拓展教程二:Ubuntu安装ROS¶
本教程介绍在ubuntu系统上安装ROS的简单方法。
你也可以直接参照ROS官方给出的安装方法。
该教程的版本为ubuntu16.04和ROS Kinetic。
以下命令都是在已经安装好的ubuntu16.04系统上打开的命令行中运行的。
第一步:设置软件源¶
这里使用中科大的备份ROS源。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
第二步:设置软件安装keys¶
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
第三步:本机更新软件源¶
sudo apt-get update
第五步:设置环境,验证安装完成¶
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
此时,你就可以在命令行中键入
roscore
并能正常运行了,说明ROS安装完成了。
第六步:安装ROS依赖和编译库¶
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python-rosdep
先运行
sudo rosdep init
然后运行
rosdep update
如果出现:
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml]:
<urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml)
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml]:
<urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml)
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml]:
<urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml)
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml]:
<urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml)
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml]:
Failed to download target platform data for gbpdistro:
<urlopen error [Errno 111] Connection refused>
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
ERROR: error loading sources list:
<urlopen error <urlopen error [Errno 111] Connection refused> (https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml)>
则是由于国内直通github网站被墙引起的,可通过以下方法解决:
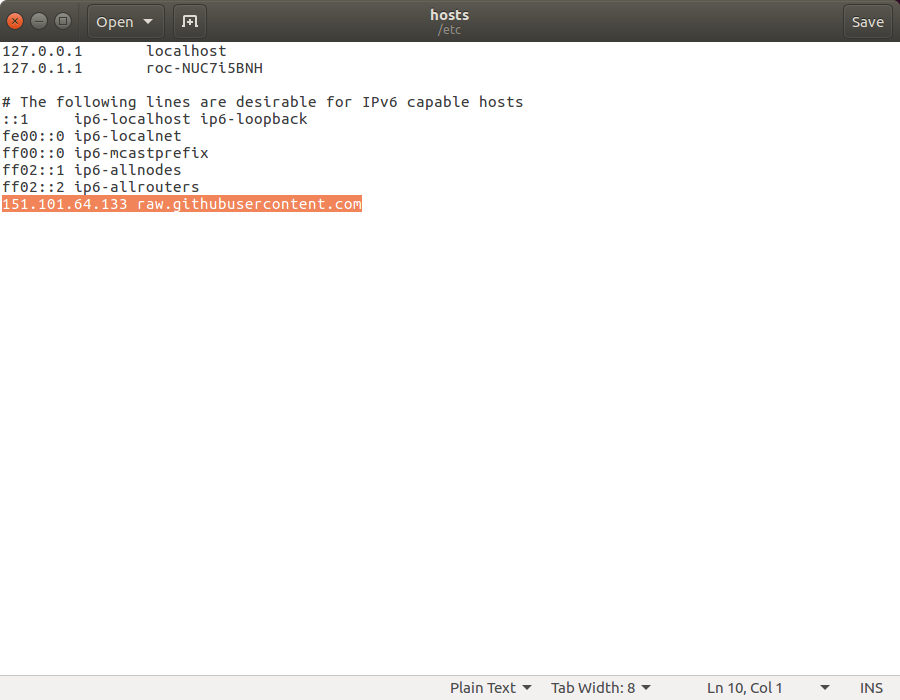
首先修改本地的/etc/hosts文件
sudo gedit /etc/hosts
在末尾加上一行:
151.101.64.133 raw.githubusercontent.com
然后再运行 rosdep update,此时应该会显示成功。
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Add distro "dashing"
Add distro "eloquent"
Add distro "foxy"
Skip end-of-life distro "groovy"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Add distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/roc/.ros/rosdep/sources.cache
如果第一次运行就成功,则忽略此解决办法。