使用机器人APP快速上手机器人¶
目前我们提供了Android应用”UXbot助手APP“来与XBot进行交互。
UXbot助手是面向用户的操作终端,方便用户实时掌控XBot状态以及对XBot进行交互操作。
用户可以从UXbot助手上了解当前XBot-U机器人的电量,摄像头俯仰角度,摄像头平台的旋转角度。
用户也可以通过UXBot助手来调节XBot的摄像头俯仰角度、摄像头平台旋转角度。
用户可以通过界面上的摇杆控件,来控制XBot-U机器人进行移动,还可以实时查看XBot上的摄像头拍摄到的图像。
提示:该APP的也可以安装到您的Android手机上运行,操作方法和效果相同。
安装UXbot助手APP¶
若您购买的机器人产品配套android平板设备,平板设备上已经安装好了APP,则无需重新安装,可跳过此步骤。
请登录重德智能官网,下载app安装。目前app仅支持andriod系统。
APP安装时,请注意:
在手机进行APP安全检测时,请选择信任该APP,勾选“我已充分了解该风险,继续安装”,且选择“继续安装”。
在安装过程中,请选择“信任此应用”给APP赋权限。请注意一定要给“调用摄像头”的权限,否则人脸模块功能将不可用。

按照提示,完成安装即可。“UXBot助手APP”的图标如下图:

网络连接¶
由于UXbot助手APP是XBot-U机器人的工具APP。在使用之前,我们需要如下操作:
首选要开启XBot-U机器人电源开关,等待XBot-U机器人完成启动(大约30秒左右)。启动后,我们可以观察激光雷达传感器开始不停的旋转,电源指示灯也亮起。
若XBot-U带机械臂,请确保机器人附近0.7米范围内无任何障碍物,避免发生碰撞。
拿出手机或者平板,在WLAN网络中,找到“xbot_network-bj*”类似命名的无线网络,并连接。*这里指代的是机器人的出厂编号,该编号可以从机器人底盘的二维码上查看得到。
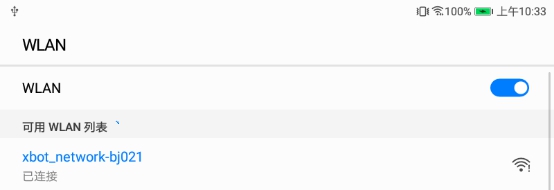
网络密码:xbot1234 。连接网络之后,就可以启动UXbot助手APP了。
启动之后,APP弹出“ROS服务器连接成功”,左上角横栏显示“在线”,则说明APP已经成功与机器人连接,下面就可以开始使用“UXBot助手APP”来控制机器人了。
当app显示“ros服务器未连接”提示时,首先请检查机器人是否正常启动,然后检查手机或者平板是否连接了机器人WLAN网络,**再将当前的app进程在后台清理掉,最后重启app。**此时一般就能够显示“ROS服务器连接成功”提示信息了。
此时,就可以正常使用app来控制机器人了。
设置¶
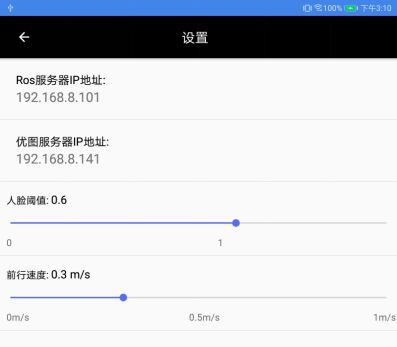
ROS服务器IP地址
Ros服务器IP地址默认是192.168.8.101.一般不需要修改,除非当XBot-U机器人主机的IP地址修改,否则不需要修改。
人脸识别盒子服务器IP地址
人脸识别盒子服务器IP地址默认是192.168.8.141.一般不需要修改,除非当XBot-U机器人中内置的人脸识别盒子中的IP地址修改,否则不需要修改。
设置人脸识别阈值
设置人脸识别时,当返回值confidence的返回值高于人脸识别的阈值设置时,我们认定为识别成功。
设置遥控基准速度
“前进速度”即设置机器人运动时的速度。配合“方向控制轮盘”来控制机器人的运动。
XBot-U机器人状态查看与控制¶
当UXBot助手连接上ros服务器后,可以在"显控"界面实时查看到Xbot的状态,包括电量,摄像头俯仰角度,摄像头平台旋转角度(即云台角度)等。
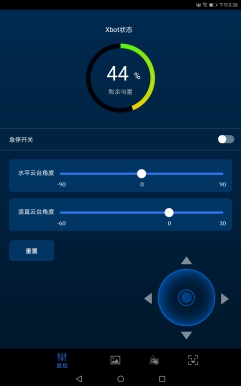
电池电量显示¶
上方剩余电量显示的即为机器人剩余的电池电量状态。当电量小于25%时,请注意需要连接电源充电。
水平云台垂直云台位置显示与控制¶
“水平云台角度”:显示的即为当前水平云台的角度信息。用手拖动滑块可以改变角度,机器人会随之调整水平云台角度,实现类似人类“转脖子”的动作。水平云台左右旋转的角度是90度。
“垂直云台角度”:显示的即为当前垂直云台的角度信息。用手拖动滑块可以改变角度,机器人会随之调整垂直云台角度,实现类似人类“低头抬头”的动作。垂直云台向下可以低头60度,向上仰头30度。
重置xbot云台状态¶
“重置”按钮,可以将“水平云台角度”和“垂直云台角度”重置为0度,同时机器人的水平云台和数直云台恢复到初始零度状态。
方向控制轮盘¶
图中圆形区域即为“方向控制轮盘”,用来控制机器人移动时的方向。
l 0度方向:右转
l 90度方向:前进
l 180度方向:左转
l 270度方向:后退
说明:“方向控制轮盘”只控制方向,运动的速度需要在“设置”中进行设置。

人脸管理与识别¶
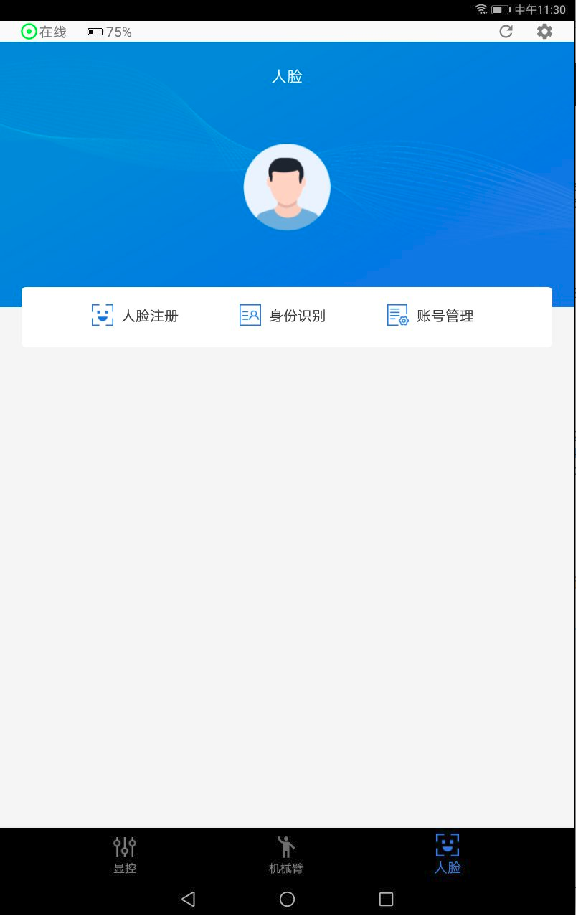
人脸注册¶
当需要给机器人录入新的注册用户是,就可以按照以下操作步骤即可完成人脸注册:
人脸--->人脸注册--->输入用户ID--->采集人脸图像--->确认注册。
注册完成之后,才能在身份认证中被识别出来。
注意:
注册时,请输入字母或数字,目前暂不支持汉字
使用app注册后的在ros下话题输出的识别结果是一个代码。
身份识别¶
身份识别在机器人应用中一般结合应用场景,与语音识别、运动导航等融合使用。APP中只提供基本的检测功能,即识别出人脸图像所对应的注册用户的ID。该功能的使用很简单,只需要按照如下步骤操作即可:
人脸--->身份识别--->将人脸置于采集图框--->识别成功提示且输出用户ID。

账号管理¶
账号管理用于对已经注册的用户进行查看、编辑、删除等管理操作。app通过如下列表的方式展示机器人上已经注册过的用户信息。我们还可以通过APP添加注册用户,编辑注册用户信息,删除注册用户等操作。
