快速上手机械臂¶
本章节将介绍如何使用moveit和Rviz快速设定目标状态、进行路径规划和控制机械臂执行路径,以及使用带moveit解算的键盘控制脚本控制机械臂的运动。
启动机械臂和moveit¶
在运行程序前,请确保机器人附近0.8米范围内无任何障碍物。
按“Ctrl Alt T”打开新的命令行终端,在终端内输入以下命令启动机械臂的驱动程序:
roslaunch xarm_driver xarm_driver.launch
下面可以启动机械臂的moveit相关解算程序,新开终端,在终端中输入以下命令:
roslaunch xarm_moveit_config xarm_moveit_planning_execution.launch
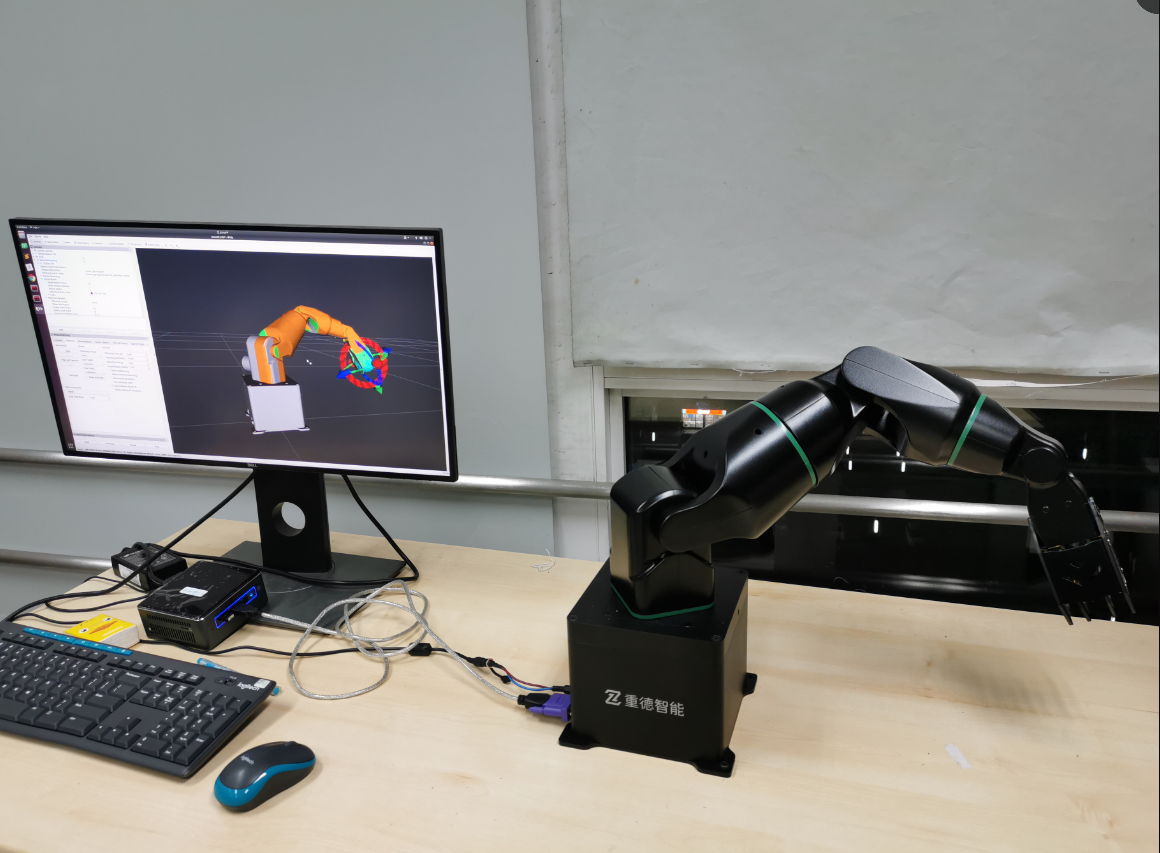
启动后,可以在显示器上看到Rviz界面显示的机械臂状态与实际机械臂的状态一致。
使用Rviz界面控制机械臂¶
可以在Rviz界面里设置目标点,让机械臂进行路径规划和轨迹执行。
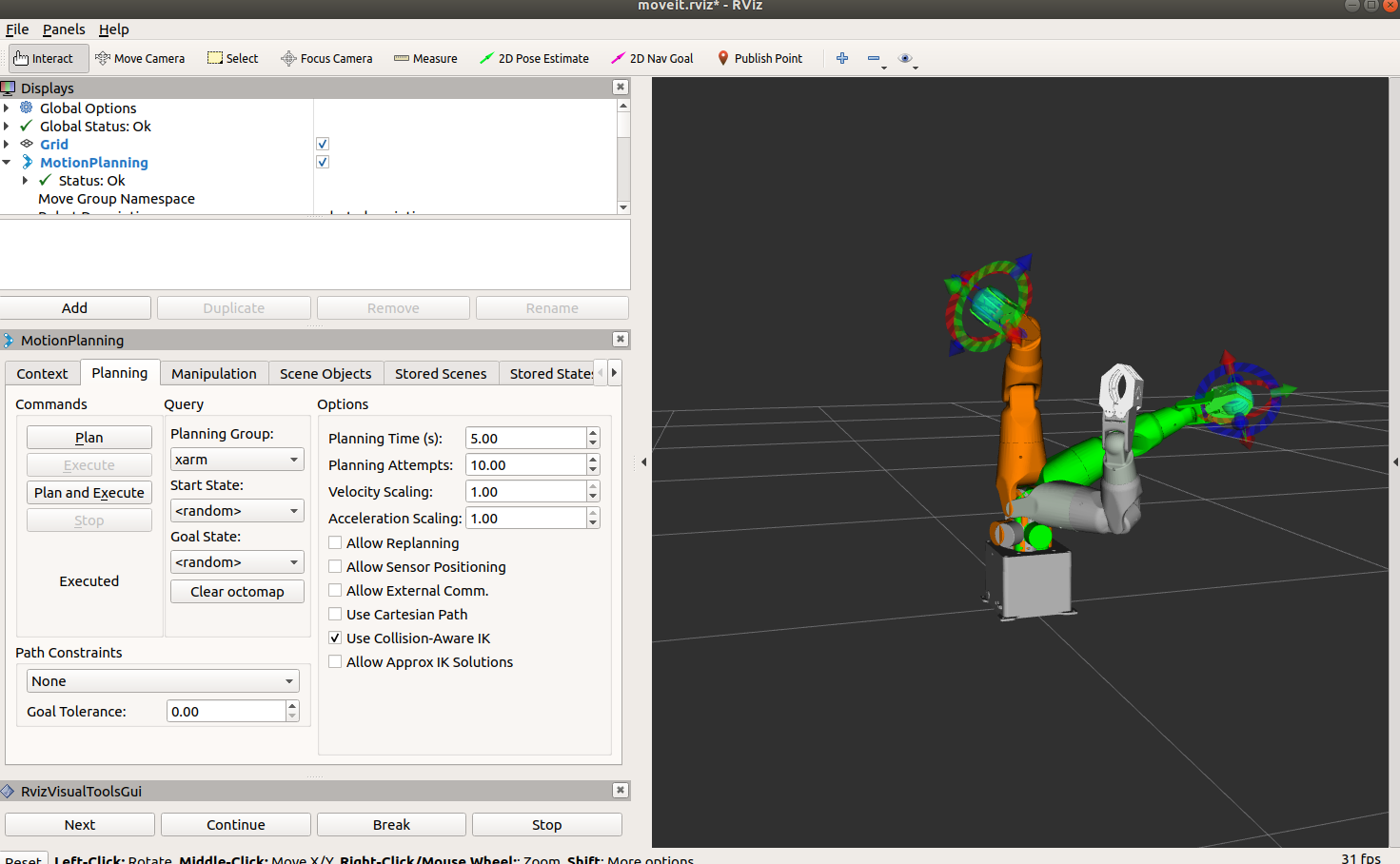
第一小节启动的RViz界面如下图所示:
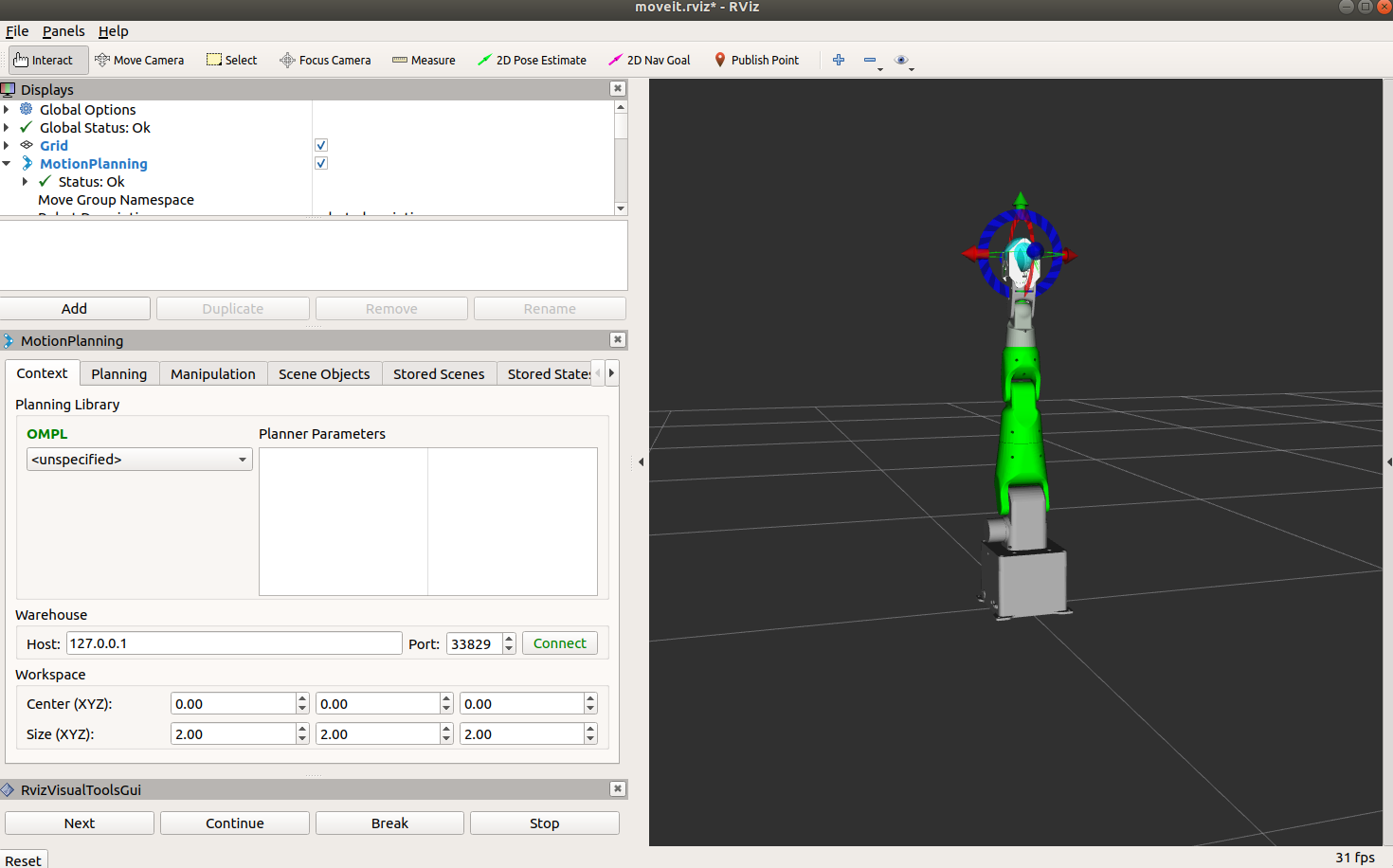
Rviz的右侧面板显示的机器人的模型和状态,左下角是“MotionPlanning”面板。鼠标点击“Planning”按钮切换到planning界面,可以看到信息如下图:
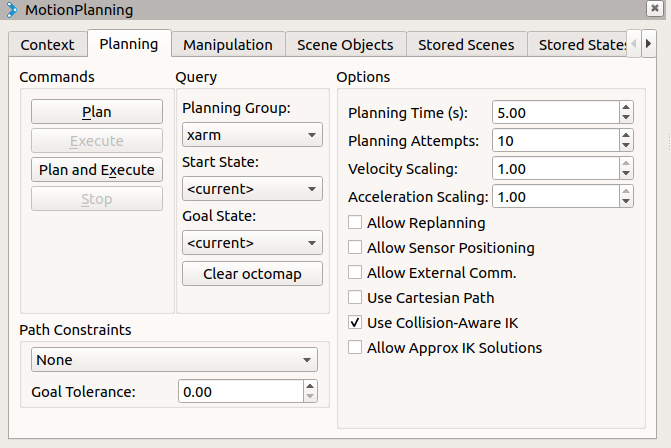
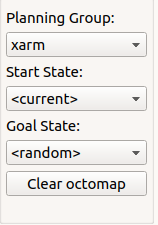
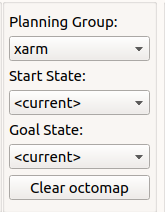
中间“Planning Group”选择“xarm”, “Start State”选择“current”, “Goal State”鼠标点击下拉菜单选择“random”,可以看到右侧面板中机器人随机生成了一个目标状态(橙色机械臂)。
若此机械臂目标状态显示无红色碰撞提醒,则可点击“commands”标签内的“Plan”按钮进行路径规划:
点击后,若有可执行路径,则可在右侧面板看到规划出的轨迹路径。若没有可执行路径,或者该目标状态不是自己想要的状态,可以重新在“Goal State”下鼠标点击下拉菜单选择“random”,重新生成一个目标状态进行plan。
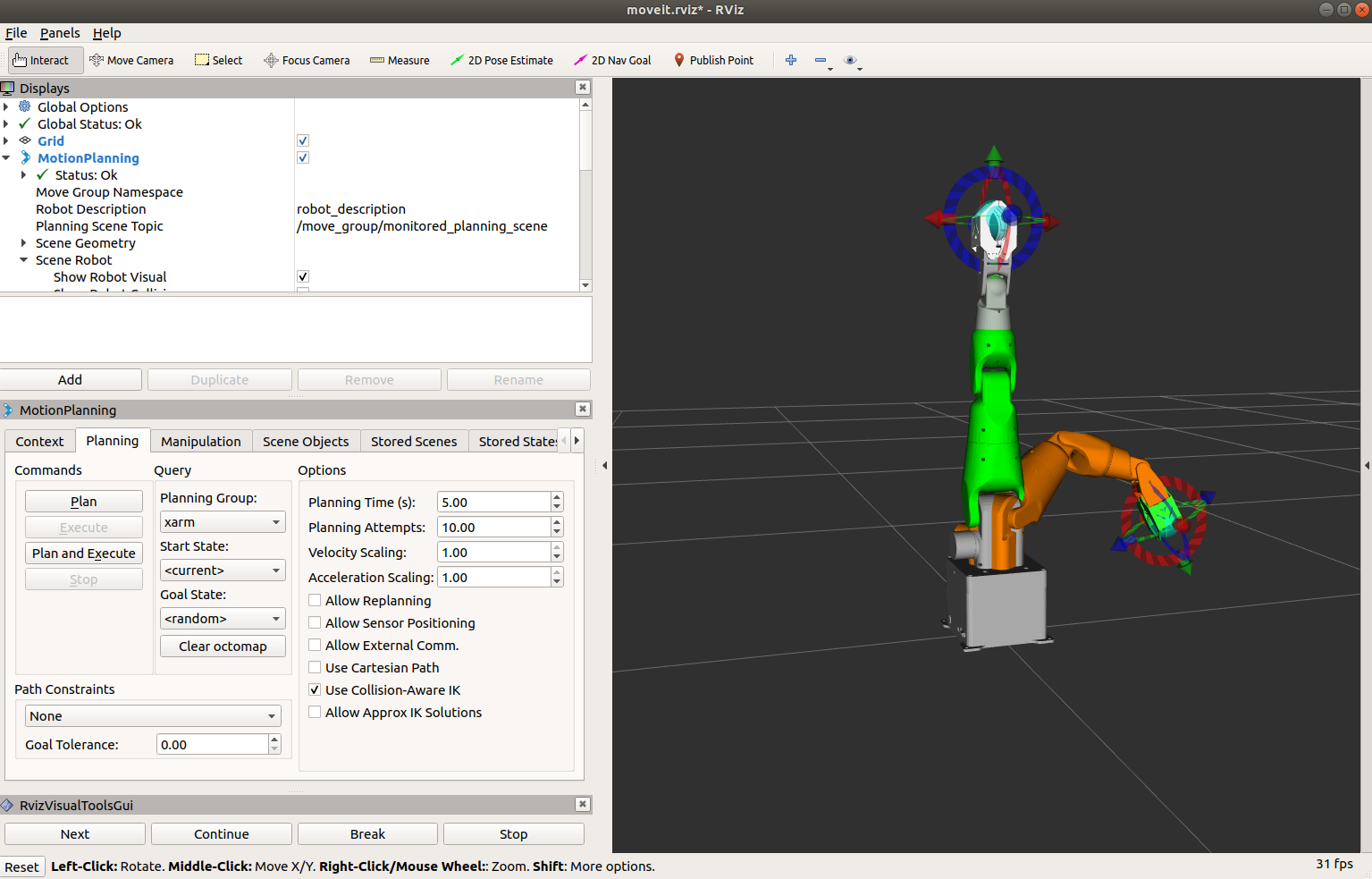
plan结束后,点击“Execute”执行按钮控制真实机械臂的执行规划出的轨迹,机械臂会逐步运动到目标状态。真实机械臂运动过程中,Rviz里的机械臂状态也会跟着更新,最终到达目标位置后,代表机械臂开始状态的绿色机械臂也会更新到目标位置处。下图是机械臂运动到目标位置的效果图。
**注意:**若某次执行完轨迹后,RViz里的绿色初始状态橙色目标状态没有与黑色的实际机器人状态重合,如下图所示:
则在设置新的目标前,需要在“Start State”鼠标点击下拉菜单选择“current”, “Goal State”鼠标点击下拉菜单选择“current”,让开始状态和目标状态与当前位置一致。
使用键盘控制机械臂¶
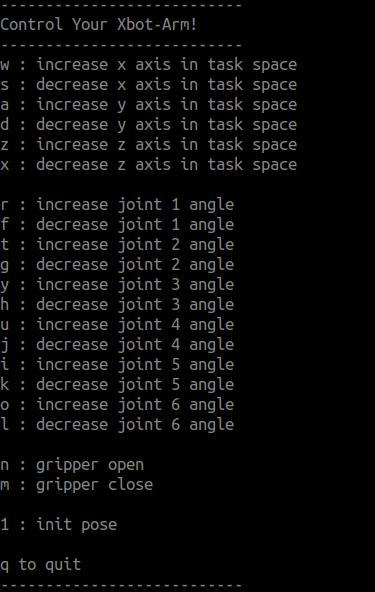
启动机械臂和moveit后,启动键盘控制脚本,可以通过键盘控制机械臂的末端在x-y-z空间内进行前后左右上下的移动,也可控制每个关节进行旋转。
“Ctrl Alt T”新开一个终端,在终端内输入以下命令后回车:
rosrun xarm_teleop xarm_teleop_keyboard
按照命令窗口提示的信息按键,可以控制机械臂运动
注意:
当您控制机器人运动发现机器人无反应时,请检查鼠标是否定位在上图所示的命令窗口且处于英文输入法状态。
当按键“wsadzx”控制机械臂在x-y-z空间内移动无反应时,可能是因为目标位置属于机械臂不可达状态,请按其他按键控制向其他方向移动。
由于路径规划和执行需要时间,请在终端显示“Finish”信息后再按下一个按键。

数字按键"1"是控制机械臂返回到初始位置(竖直向上),所以注意不要靠近机械臂,防止碰撞。