机械臂产品介绍¶
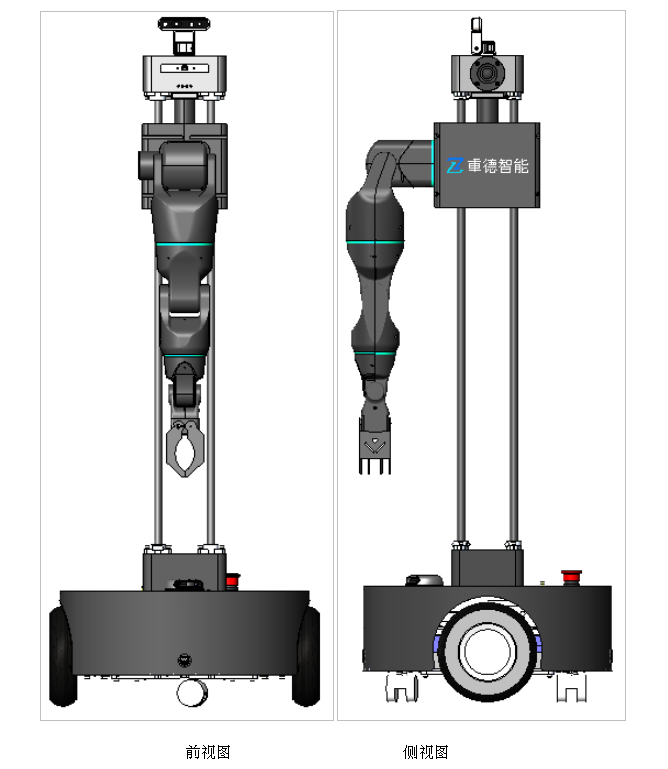
本章节将介绍xbot-arm机械臂的外观和技术参数等内容。

技术规格¶
技术参数¶
| 项目描述 | 规格 |
|---|---|
| 自重 | 约6Kg |
| 额定负载 | 500g |
| 最大负载 | 800g |
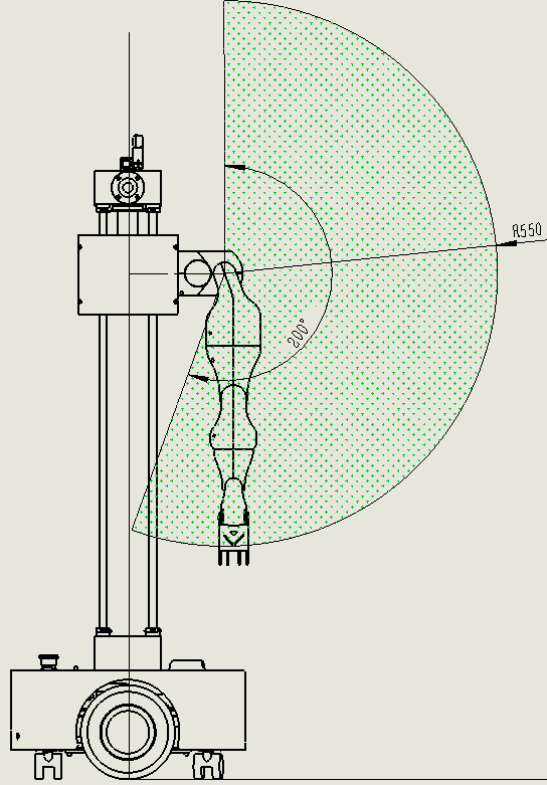
| 工作范围 | 550mm |
| 末端执行器范围 | 大于80° |
| 额定速度 | 所有腕关节:18°/s;末端执行关节:18°/s |
| 重复精度 | +-5mm |
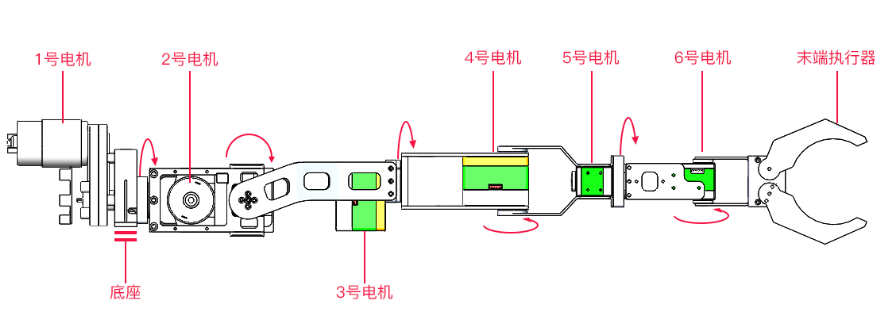
| 自由度 | 6关节+1执行 |
| 工作半径 | 550mm |
| 供电电源 | 12V |
| 通讯接口 | RS485 |
| 待机功耗 | <200mA |
| 平均功耗 | 2A |
| 峰值功耗 | 10A |
| 主体材料 | 高强度铝合金+ABS外壳 |
关节角度限制¶
机械臂舵机的各个关节角度限制如下表:
| 关节 | 角度范围(单位rad) |
|---|---|
| 关节1 | -2.094 ~ 2.094 |
| 关节2 | -2.094 ~ 1.57 |
| 关节3 | -2.79 ~ 2.79 |
| 关节4 | -1.92 ~ 1.92 |
| 关节5 | -2.79 ~ 2.79 |
| 关节6 | -1.57 ~ 1.57 |
| 末端手爪 | 0 ~ 0.69 |
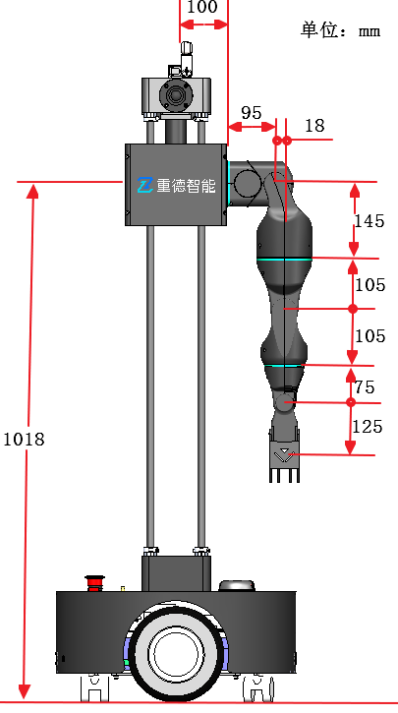
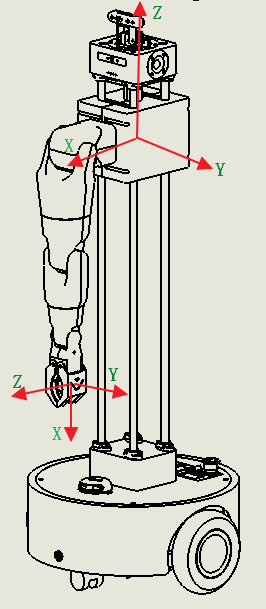
尺寸参数¶